Nächste Seite: Ressourcen
Aufwärts: Ablaufsteuerung
Vorherige Seite: Prozeßebene
Inhalt
Aktivitäten auf dieser Ebene haben keine korrespondierende Task-Struktur, da
sie keinem Prozeß zugeordnet sind, sondern vielmehr auf
Hardware-Ereignisse reagieren. Aus diesem Grund werden sie auch
bevorzugt ausgeführt, d.h. Prozeßaktivitäten werden erst nach Ausführung
aller Aktivitäten auf der Interruptebene fortgesetzt.
Aber auch auf der Interruptebene sind nicht alle Threads gleich priorisiert. So
kann der Interrupt-Handler bei zugelassenen Unterbrechungen jede
Aktivität von der CPU verdrängen. Für den Zeitraum der Bearbeitung eines
Interrupts sind weitere Unterbrechungen auf dieser CPU oft2.5 gesperrt, so
daß die nötigen Aktionen in drei Gruppen unterteilt werden:
- Kritisch
- sind interrupt acknowledgement und Reprogrammierung des
PIC bzw. Gerätecontrollers. Unterbrechungen dürfen nicht auftreten.
- Nicht kritisch
- sind Aktionen, die Datenstrukturen aktualisieren und
schnell beendet werden können. Unterbrechungen können zugelassen
werden2.6.
- Nicht kritisch & aufschiebbar
- sind Aktionen wie langwierige
Kopierperationen innerhalb des Hauptspeichers, die möglicherweise
blockierende Funktionen benötigen.
Im Linuxkern werden Aktionen der ersten beiden Gruppen unter dem Begriff
top half zusammengefaßt und sind Bestandteil des registrierten
Interrupt-Handlers. Die letzte Gruppe macht die bottom half (BH)
aus, deren Ausführung zu einem späteren Zeitpunkt stattfinden kann.
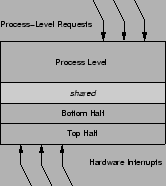
Abb. 2.7 präzisiert den in
Abschnitt 2.2 beschriebenen Aufbau für
Linux-Gerätetreiber.
Abbildung:
Prozeß- und Interruptebene im Linuxkern
|
|
Die Aktivitäten der Interuptebene können nun direkt von einem Interrupt
angestoßen werden und somit in der Top Half liegen oder zu einem späteren
Zeitpunkt (durch die Top Half angestoßen) als Bottom Half ausgeführt werden.
Während der fortschreitenden Entwicklung des Linuxkerns wurde dieses Konzept
stetig ausgefeilt und neben den old-style Bottom Halves existieren auch
neuere deferred activities:
- Bottom Halves
- implementieren die Ursprungsidee, werden dabei aber streng
serialisiert. D.h. auch in SMP-Systemen ist stets nur eine BH zu einem
Zeitpunkt aktiv, um der Annahme zu entsprechen, daß keine weitere BH parallel
Daten verändert.
Diese Funktionalität stammt noch aus der nicht-SMP Zeit von Linux und ist,
wie man leicht erkennen kann, nicht besonders gut geeeignet für Plattformen
mit mehreren Prozessoren.
- Tasklets
- erweitern das BH-Konzept dahingehend, daß nun Typen von
deferred activities existieren, welche serialisiert werden. Es können
also in Multiprozessor-Systemen mehrere Tasklets gleichzeitig ausgeführt
werden, wenn sie nicht vom gleichen Typ sind.
Tatsächlich sind alle old-style Bottom Halves ein Tasklettyp in Linux
2.4, so ist ihre Serialisierung bewahrt und Parallelität in Bezug auf
new-style Tasklets gewährt.
- Softirqs
- repräsentieren die Idee, daß deferred activities
vollständig parallel ablaufen können, also insbesondere auch verschiedene
Instanzen ein und derselben Aktivität. Diese Freiheit erzwingt aber
reentrante Funktionen und intelligente Sperren.
Wie vorab schon erwähnt, ist die Komponente, welche von der SMP-Fähigkeit der
Version 2.4 des Linuxkerns hauptsächlich profitiert, der
Netzwerk-Protokollstack. Beide Pfade -- Senden und Empfangen -- werden hier
als softirqs implementiert (siehe [T$^+$01] Datei
net/core/dev.c: net_rx_action() bzw.
net_tx_action()), sind also reentrante Funktionen.
In Zukunft sollen die BHs allmählich verschwinden und durch Tasklets ersetzt
werden. Die softirqs sollen aber wichtigen Kernaktivitäten vorbehalten
bleiben und sind bisher nur für den TCP/IP-Stack geplant.
Nächste Seite: Ressourcen
Aufwärts: Ablaufsteuerung
Vorherige Seite: Prozeßebene
Inhalt
Christian Helmuth
2001-12-11